
ラジアル磁束モーターと比較して、アキシャル磁束モーターには電気自動車の設計において多くの利点があります。たとえば、アキシャルフラックスモーターは、モーターを車軸からホイールの内側に移動することで、パワートレインの設計を変更できます。
1.力の軸
アキシャル磁束モータますます注目を集めています(注目を集めています)。長年にわたり、このタイプのモーターはエレベーターや農業機械などの定置用途に使用されてきましたが、過去 10 年間、多くの開発者がこの技術を改良し、電動バイク、空港ポッド、貨物トラック、電気自動車などに適用することに取り組んできました。乗り物、さらには飛行機も。
従来のラジアルフラックスモーターは永久磁石または誘導モーターを使用しており、重量とコストの最適化において大幅な進歩を遂げています。しかし、開発を続けるには多くの困難に直面しています。まったく異なるタイプのモーターである軸方向磁束が、良い代替手段になる可能性があります。
ラジアル モーターと比較して、アキシャル磁束永久磁石モーターの有効磁気表面積は、外径ではなくモーター ローターの表面です。したがって、一定の容積のモーターでは、アキシャル磁束永久磁石モーターは通常、より大きなトルクを提供できます。
アキシャル磁束モータよりコンパクトです。ラジアルモーターと比較して、モーターの軸方向の長さが大幅に短くなります。内部ホイールモーターの場合、これは多くの場合重要な要素です。アキシャル モーターのコンパクトな構造により、同様のラジアル モーターよりも高い出力密度とトルク密度が保証されるため、非常に高い動作速度が必要なくなります。
アキシャルフラックスモーターの効率も非常に高く、通常は 96% を超えます。これは、より短い一次元磁束経路のおかげで、市場で最高の 2D ラジアル磁束モーターと比較して効率が同等かそれ以上です。
モーターの長さは通常 5 ~ 8 分の 1 に短くなり、重量も 2 ~ 5 分の 1 に軽減されます。これら 2 つの要因により、電気自動車プラットフォーム設計者の選択が変わりました。
2. アキシャルフラックス技術
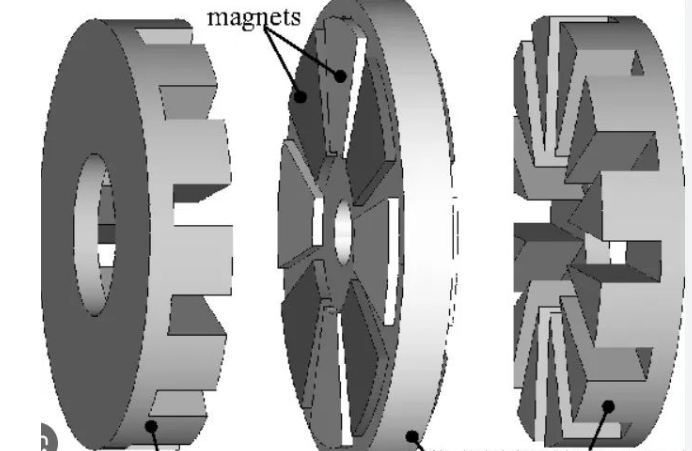
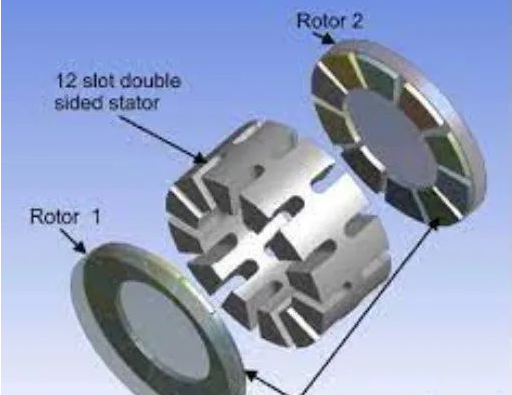
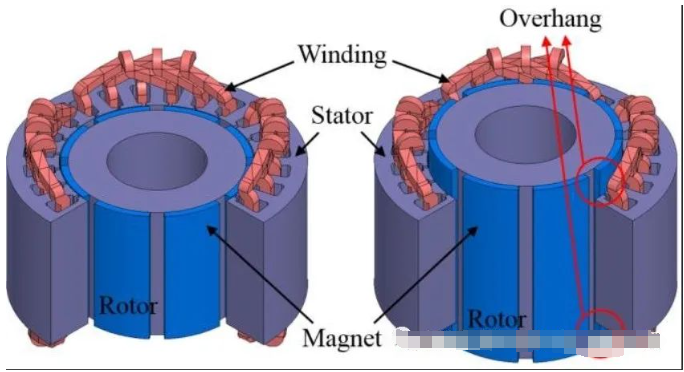
2 つの主要なトポロジがありますアキシャルフラックスモーター: デュアル ローター シングル ステーター (トーラス スタイル マシンと呼ばれることもあります) およびシングル ローター デュアル ステーター。
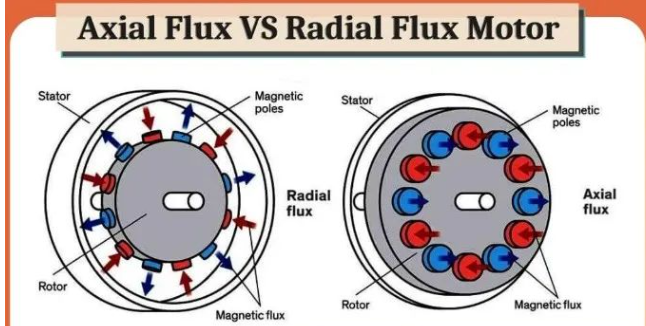
現在、ほとんどの永久磁石モーターはラジアル磁束トポロジーを使用しています。磁束回路は、ローター上の永久磁石から始まり、ステーター上の最初の歯を通過し、ステーターに沿って放射状に流れます。次に、2 番目の歯を通過して、ローターの 2 番目の磁性鋼に到達します。デュアルローターの軸方向磁束トポロジーでは、磁束ループは最初の磁石から始まり、軸方向にステーターの歯を通過し、すぐに 2 番目の磁石に到達します。
これは、磁路がラジアルフラックスモーターよりもはるかに短いことを意味し、その結果、同じ出力でモーターの体積が小さくなり、出力密度と効率が高くなります。
ラジアルモーターでは、磁束が最初の歯を通過し、ステーターを通って次の歯に戻り、磁石に到達します。磁束は 2 次元の経路をたどります。
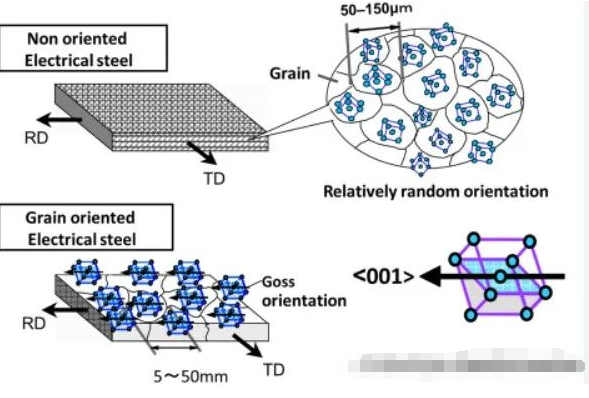
アキシャル磁束マシンの磁束経路は一次元であるため、方向性電磁鋼板を使用できます。この鋼によりフラックスが通りやすくなり、効率が向上します。
ラジアル磁束モーターは伝統的に分布巻を使用しており、巻線の端の最大半分が機能していません。コイルのオーバーハングにより、重量、コスト、電気抵抗が増加し、熱損失が増加するため、設計者は巻線設計の改善を余儀なくされます。
コイルエンドは、アキシャルフラックスモーターははるかに少なく、完全に効果的な集中巻または分割巻を使用する設計もあります。セグメント化されたステータラジアルマシンの場合、ステータ内の磁束経路の断裂により追加の損失が生じる可能性がありますが、アキシャルフラックスモータの場合、これは問題になりません。コイル巻線の設計は、サプライヤーのレベルを区別する鍵となります。
3.開発
アキシャルフラックスモーターは、その技術的利点にもかかわらず、設計と製造においていくつかの深刻な課題に直面していますが、コストはラジアルモーターのコストよりもはるかに高くなります。人々はラジアルモーターについて非常によく理解しており、製造方法や機械設備も容易に入手できます。
アキシャル磁束モータの主な課題の 1 つは、ロータとステータの間の均一なエア ギャップを維持することです。これは、磁力がラジアル モータよりもはるかに大きいため、均一なエア ギャップを維持することが困難であるためです。デュアルローターアキシャルフラックスモーターには熱放散の問題もあります。巻線がステーターの奥深く、2 つのローターディスクの間に配置されているため、熱放散が非常に困難です。
アキシャル磁束モーターも多くの理由から製造が困難です。ヨーク トポロジ (つまり、ステータから鉄のヨークを除去するが、鉄の歯は保持する) を備えたデュアル ローター マシンを使用するデュアル ローター マシンは、モーターの直径と磁石を拡大することなく、これらの問題のいくつかを克服します。
ただし、ヨークを除去すると、機械的なヨーク接続を使用せずに個々の歯をどのように固定して位置決めするかなど、新たな課題が生じます。冷却も大きな課題です。
また、ローターディスクがローターを引き付けるため、ローターを製造してエアギャップを維持することも困難です。利点は、ローターディスクがシャフトリングを介して直接接続されているため、力が互いに打ち消し合うことです。これは、内部ベアリングがこれらの力に耐えられず、その唯一の機能がステーターを 2 つのローター ディスク間の中間位置に維持することであることを意味します。
ダブルステーターシングルローターモーターは円形モーターのような課題に直面しませんが、ステーターの設計ははるかに複雑で自動化が難しく、関連コストも高くなります。従来のラジアル磁束モーターとは異なり、アキシャル モーターの製造プロセスと機械装置は最近登場したばかりです。
4. 電気自動車の応用
自動車業界では信頼性が非常に重要であり、さまざまな製品の信頼性と堅牢性を証明しています。アキシャルフラックスモーターこれらのモーターが大量生産に適していることをメーカーに納得させるのは常に課題でした。これにより、アキシャル モーターのサプライヤーは独自に広範な検証プログラムを実行するようになり、各サプライヤーはモーターの信頼性が従来のラジアル フラックス モーターと変わらないことを実証しました。
摩耗する可能性がある唯一のコンポーネントアキシャルフラックスモーターベアリングです。軸方向の磁束の長さは比較的短く、ベアリングの位置は近くにあり、通常はわずかに「オーバー寸法」になるように設計されています。幸いなことに、アキシャルフラックスモーターはローターの質量が小さく、より低いローターの動的シャフト負荷に耐えることができます。したがって、ベアリングに実際にかかる力は、ラジアルフラックスモーターよりもはるかに小さくなります。

電子アクスルは、アキシャル モーターの最初のアプリケーションの 1 つです。幅を薄くすることで、モーターとギアボックスを車軸内に封入できます。ハイブリッド用途では、モーターの軸方向の長さが短くなることで、トランスミッションシステムの全長も短くなります。
次のステップは、アキシャルモーターをホイールに取り付けることです。これにより、モーターから車輪に動力を直接伝えることができ、モーターの効率が向上します。トランスミッション、ディファレンシャル、ドライブシャフトが不要になったことにより、システムの複雑さも軽減されました。
ただし、標準構成はまだ登場していないようです。アキシャルモーターのサイズや形状の違いにより電気自動車の設計が変わる可能性があるため、各 OEM メーカーは具体的な構成を研究しています。ラジアル モーターと比較して、アキシャル モーターは出力密度が高いため、より小型のアキシャル モーターを使用できます。これにより、バッテリー パックの配置など、車両プラットフォームに新しい設計オプションが提供されます。
4.1 分割アーマチュア
YASA (ヨークレスおよびセグメント化アーマチュア) モーター トポロジは、デュアル ローター シングル ステーター トポロジーの一例であり、製造の複雑さが軽減され、自動化された大量生産に適しています。これらのモーターは、2000 ~ 9000 rpm の速度で最大 10 kW/kg の出力密度を備えています。

専用コントローラーを使用することでモーターに200kVAの電流を供給できます。コントローラの容積は約 5 リットル、重量は誘電体オイル冷却による熱管理を含めて 5.8 キログラムで、アキシャル磁束モータだけでなく誘導モータやラジアル磁束モータにも適しています。
これにより、電気自動車の相手先商標機器メーカーや第一次開発者は、用途や利用可能なスペースに基づいて適切なモーターを柔軟に選択できるようになります。サイズと重量が小さくなったことで車両が軽くなり、より多くのバッテリーを搭載できるため、航続距離が長くなります。
5. 電動バイクの応用
電動バイクや ATV 用に、AC アキシャル磁束モーターを開発した企業もあります。このタイプの車両に一般的に使用されている設計は DC ブラシ ベースの軸方向磁束設計ですが、新製品は AC 完全密閉型ブラシレス設計です。
DC モーターと AC モーターの両方のコイルは固定されたままですが、デュアル ローターは回転アーマチュアの代わりに永久磁石を使用します。この方法の利点は、機械的な反転を必要としないことです。
AC アキシャル設計では、ラジアル モーターに標準の三相 AC モーター コントローラーを使用することもできます。コントローラーは速度ではなくトルク電流を制御するため、コストの削減に役立ちます。コントローラには、このようなデバイスの主流の周波数である 12 kHz 以上の周波数が必要です。
より高い周波数は、20 µH の低い巻線インダクタンスから得られます。周波数は電流を制御して電流リップルを最小限に抑え、正弦波信号を可能な限り滑らかにすることができます。動的観点から見ると、これは急速なトルク変化を可能にし、よりスムーズなモーター制御を実現する優れた方法です。
この設計は分布二層巻線を採用しているため、磁束はローターからステーターを通って別のローターに流れる経路が非常に短く、効率が高くなります。
この設計の重要な点は、最大電圧 60 V で動作できることですが、高電圧システムには適していません。そのため電動バイクやルノー・ツイジーなどのL7eクラス四輪車にも使用可能です。
最大電圧が 60 V であるため、モーターを主流の 48 V 電気システムに統合でき、メンテナンス作業が簡素化されます。
欧州フレームワーク規則 2002/24/EC の L7e 四輪二輪車仕様では、物品の輸送に使用される車両の重量はバッテリーの重量を除いて 600 kg を超えないと規定されています。これらの車両は、乗客 200 キログラム以下、貨物 1,000 キログラム以下、エンジン出力 15 キロワット以下を運ぶことが許可されています。分布巻方式は、トルク 75 ~ 100 Nm、最大出力 20 ~ 25 kW、連続出力 15 kW を提供できます。
軸方向磁束の課題は、銅巻線がどのように熱を放散するかにありますが、熱はローターを通過する必要があるため、これは困難です。分布巻には多数の極スロットがあるため、この問題を解決する鍵となります。このようにして、銅とシェルの間の表面積が大きくなり、標準的な液体冷却システムによって熱が外部に伝達され、排出されます。
正弦波形を利用するには複数の磁極が重要であり、高調波の低減に役立ちます。これらの高調波は磁石とコアの加熱として現れますが、銅部品は熱を持ち去ることができません。磁石や鉄心に熱が溜まると効率が低下するため、モーターの性能には波形と熱経路の最適化が重要です。
モーターの設計を最適化することでコストを削減し、自動量産を実現しました。押出成形ハウジングリングは複雑な機械加工を必要とせず、材料コストを削減できます。コイルは直接巻くことができ、正しい組み立て形状を維持するために巻線プロセス中に接着プロセスが使用されます。
重要な点は、コイルが標準的な市販のワイヤで作られているのに対し、鉄心は市販の標準的な変圧器鋼材で積層されており、形状に切断するだけで済むことです。他のモーター設計ではコアの積層に軟磁性材料を使用する必要がありますが、これはより高価になる可能性があります。
分布巻の使用は、磁性鋼をセグメント化する必要がないことを意味します。形状が単純になり、製造が容易になります。磁性鋼のサイズを小さくし、製造を容易にすることは、コスト削減に大きな影響を与えます。
このアキシャルフラックスモーターの設計は、顧客の要件に応じてカスタマイズすることもできます。お客様は、基本設計を中心にカスタマイズされたバージョンを開発しています。その後、初期の生産検証のために試作ラインで製造され、他の工場でも再現できます。
カスタマイズの主な理由は、車両の性能が軸方向磁束モーターの設計だけでなく、車両構造、バッテリーパック、BMS の品質にも依存するためです。
投稿日時: 2023 年 9 月 28 日


